Action Chunking Transformer
What’s Action Chunking Transformer?
In the paper:
We implement action chunking policy with Transformers, an architecture designed for sequence modeling, and train it as a conditional VAE (CVAE)
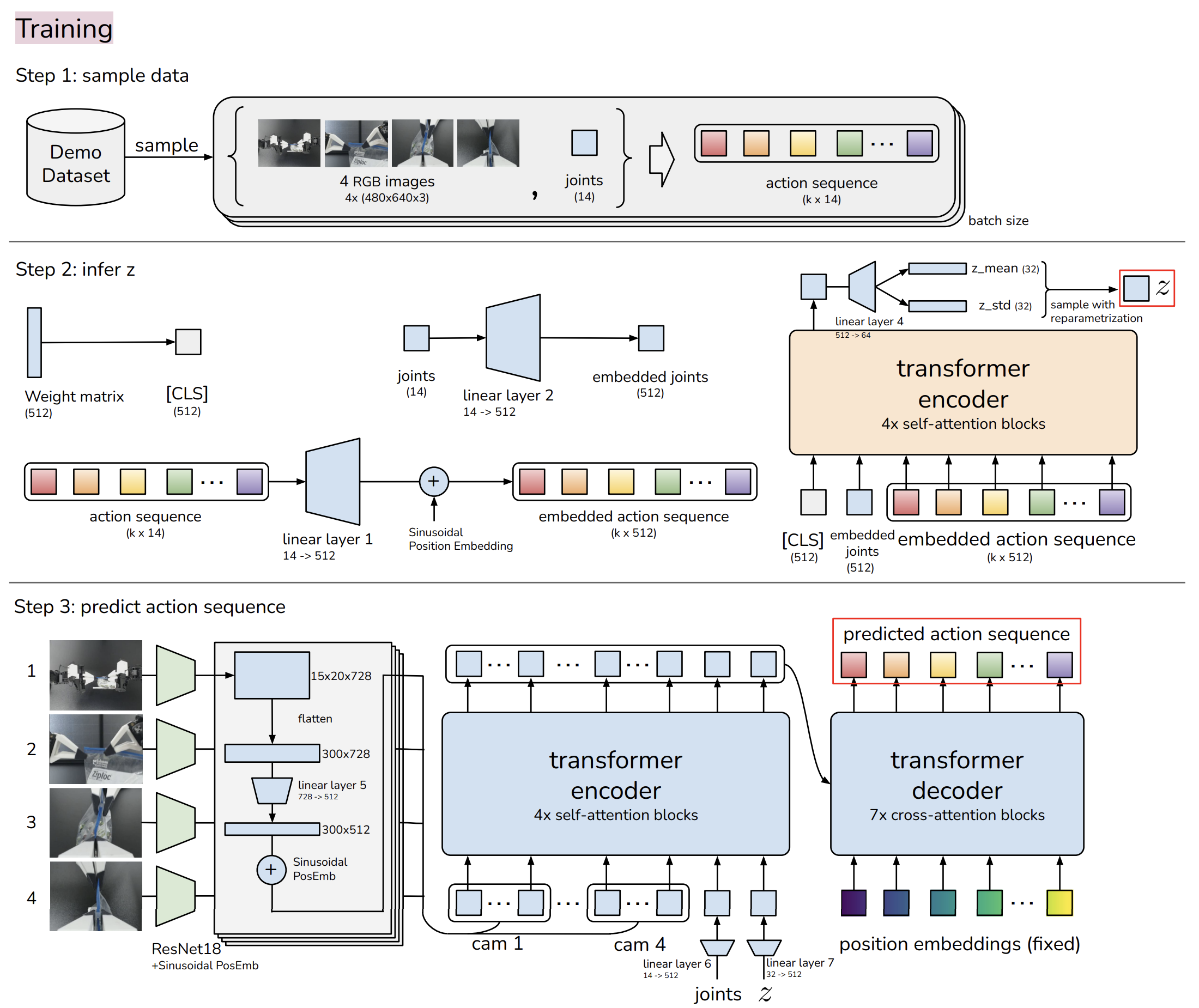
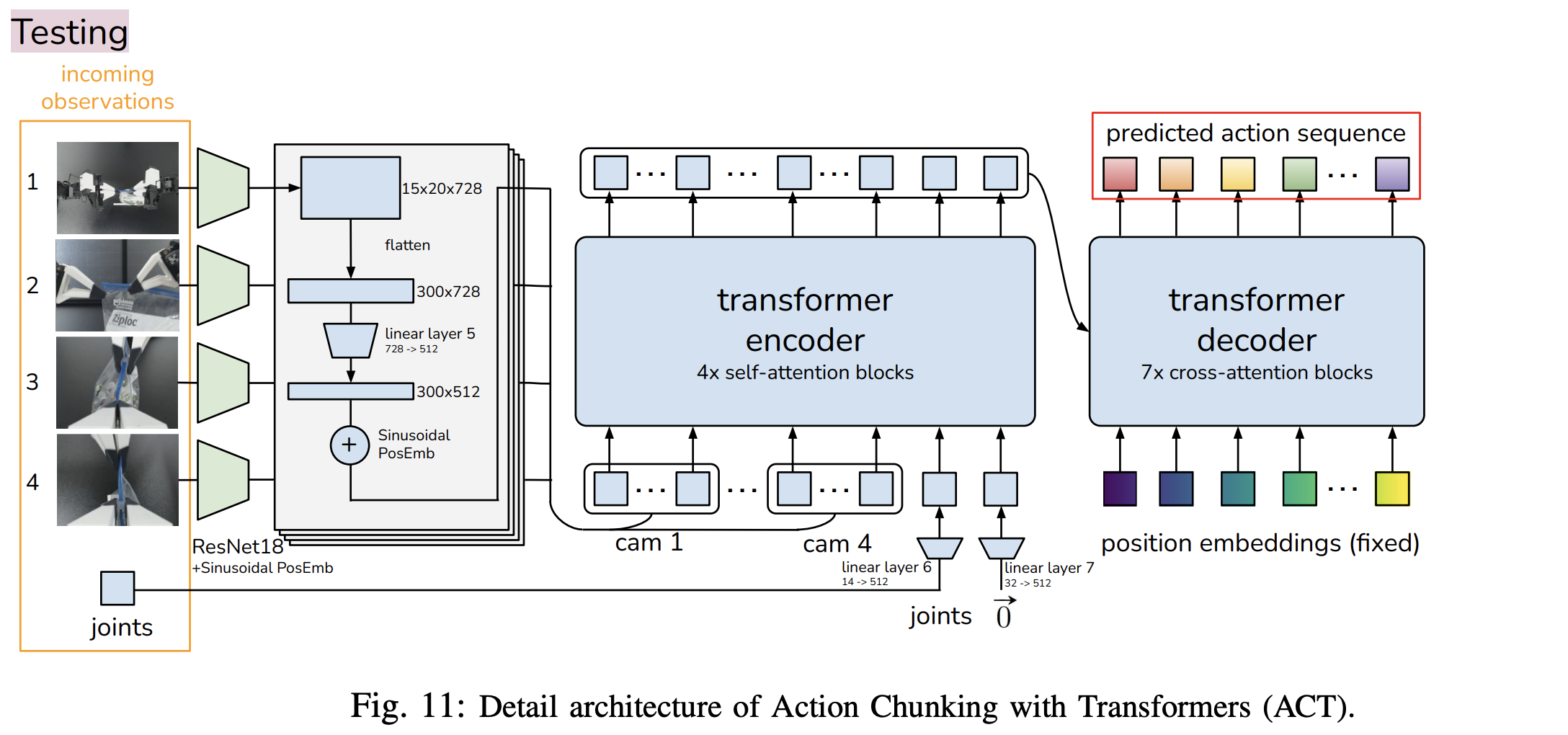
Architecture
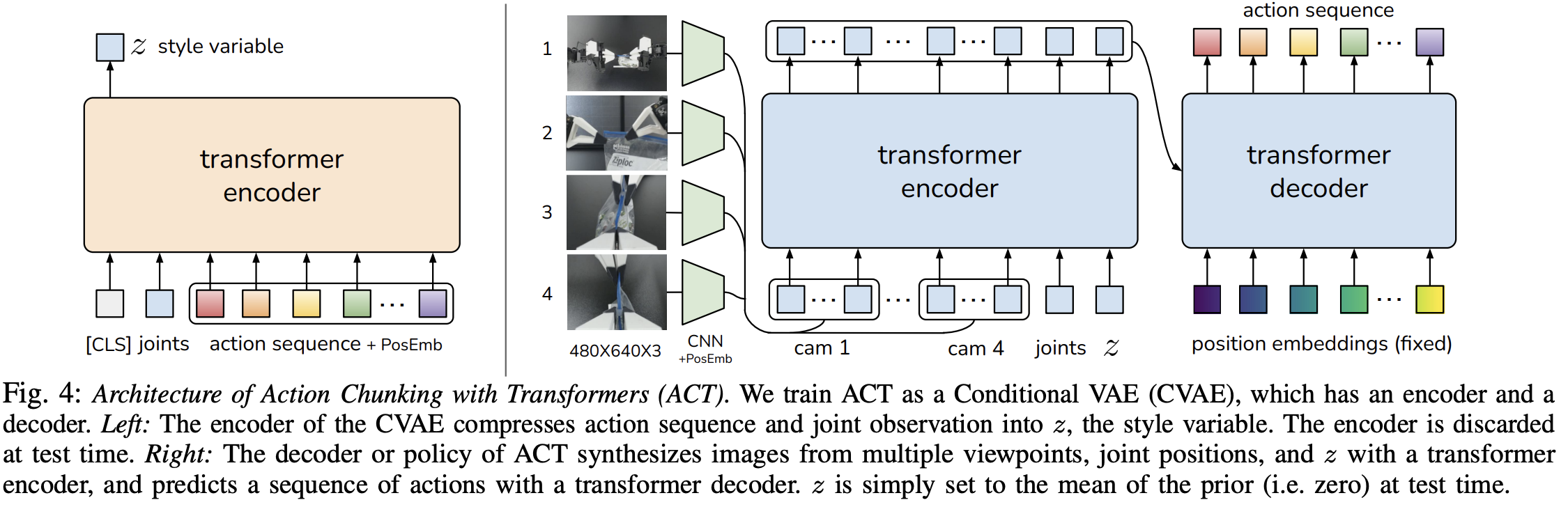
- Input: 여러 카메라 이미지, 로봇 상태(qpos), 환경 상태, (학습 시) 행동 시퀀스
- Backbone: 각 카메라 이미지를 feature로 변환하는 CNN Network
- Transformer: Sequence modeling, 이미지 feature와 로봇 상태, 잠재 변수 등을 입력받음
- VAE Encoder: Action sequence를 latent variable z로 인코딩
- Decoder: latent variable z와 Input을 바탕으로 다음 행동을 예측
How to do?
Github Link: https://github.com/tonyzhaozh/act
Setup
-
Clone the repository
git clone https://github.com/tonyzhaozh/act/tree/main -
Create a new conda env
conda create -n aloha python=3.8.10 conda activate aloha pip install torchvision pip install torch pip install pyquaternion pip install pyyaml pip install rospkg pip install pexpect pip install mujoco==2.3.7 pip install dm_control==1.0.14 pip install opencv-python pip install matplotlib pip install einops pip install packaging pip install h5py pip install ipython cd act/detr && pip install -e .
Run the script
python3 record_sim_episodes.py \
--task_name sim_transfer_cube_scripted \
--dataset_dir ./dataset/ \
--num_episodes 5 \
--onscreen_render
Trouble Shooting
OSError: dlopen(/System/Library/OpenGL.framework/OpenGL, 0x0006): tried: '/System/Library/OpenGL.framework/OpenGL' (no such file), '/System/Volumes/Preboot/Cryptexes/OS/System/Library/OpenGL.framework/OpenGL' (no such file), '/System/Library/OpenGL.framework/OpenGL' (no such file, not in dyld cache)
-
Edit this:
/Users/joonhyung-lee/.pyenv/versions/<virtual-env>/lib/python3.10/site-packages/mujoco/cgl/cgl.py```python기존
_CGL = ctypes.CDLL(‘/System/Library/OpenGL.framework/OpenGL’)
수정
_CGL = ctypes.CDLL(‘/System/Library/Frameworks/OpenGL.framework/OpenGL’) ```
실행 예시:
episode_idx=0
Rollout out EE space scripted policy
episode_idx=0 Successful, episode_return=630
Replaying joint commands
episode_idx=0 Successful, episode_return=639
Saving: 0.5 secs
To train ACT
# Transfer Cube task
python3 imitate_episodes.py \
--task_name sim_transfer_cube_scripted \
--ckpt_dir ./ckpt/ \
--policy_class ACT --kl_weight 10 --chunk_size 100 --hidden_dim 512 --batch_size 8 --dim_feedforward 3200 \
--num_epochs 2000 --lr 1e-5 \
--seed 0
Enjoy Reading This Article?
Here are some more articles you might like to read next: