[paper-review] Learning with a Mole: Transferable latent spatial representations for navigation without reconstruction
ICLR. [Paper]
Guillaume Bono, Leonid Antsfeld, Assem Sadek, Gianluca Monaci and Christian Wolf 1 > 1Naver Labs Europe, Meylan, France
Sep. 29
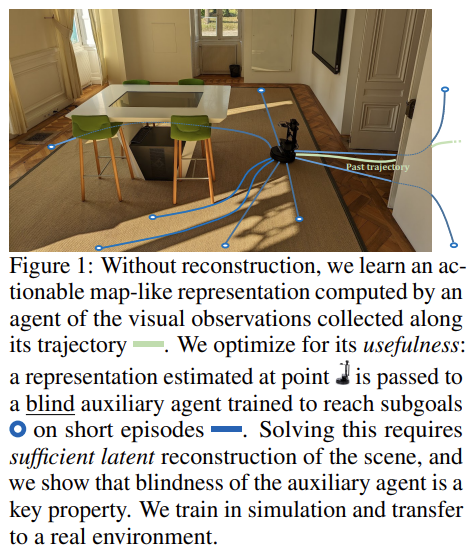
Fig. 1: Overview of MOLE.
한 문장 요약
- Navigability를 정의하고, 이 latent spatial representation을 학습하자.
Summary
- Instead of learning to reconstruct, they cast the robotic perception task as a navigation task by a blind auxiliary agent generating a learning signal for the main agent.
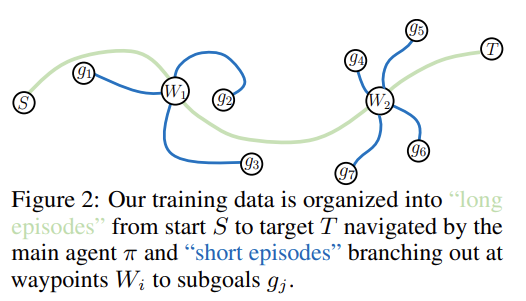
Fig. 2: Concept of MOLE.
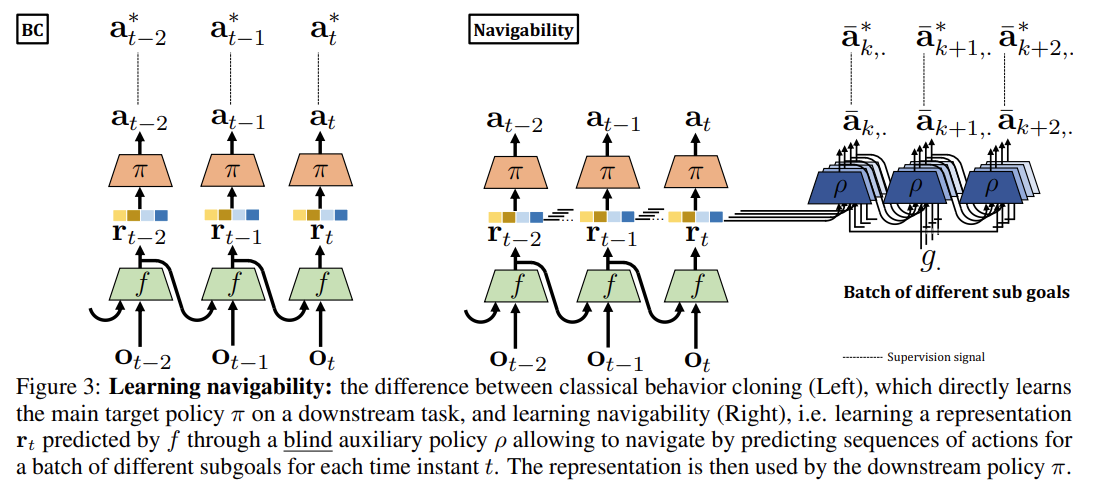
Fig. 3: Architecture of MOLE.
Contribution
- They propose learning a latent spatial representation (i.e., Navigability).
- This approach differs from traditional methods that rely on explicit scene reconstruction. Instead, it relies on a learned latent spatial representation of the environment for navigation.
- They define representation \(r_t\) and optimize it based on its amount of information. This representation is refined by a blind auxiliary agent, which operates without direct visual observations, thereby testing and refining its utility for navigation.
- The author describes the difference between the two methods based on Behavior Cloning and Navigability.
- BC directly learns the main target policy from expert trajectories, approximating the desired optimal policy. Navigability, on the other hand, focuses on learning a representation that optimizes navigational skills (i.e., actions) like detecting navigable space and avoiding obstacles, rather than reconstructing the scene in detail.
Thought
- I thought that the proposed method seems like a teacher-student network. The main policy (teacher) provides a latent spatial representation (teaching material) that the blind auxiliary agent (student) uses to learn navigational actions.
- The auxiliary agent’s performance in navigating using this representation gives feedback to improve the main agent’s ability to create effective latent representations. This method offers a more flexible and potentially robust way for robots to navigate diverse environments, especially where creating or relying on detailed maps is impractical or impossible.
- I think that It’s a notable step forward in the development of autonomous systems that can adapt to a wide range of real-world conditions.
Enjoy Reading This Article?
Here are some more articles you might like to read next: