[paper-review] Fast-Replanning Motion Control for Non-Holonomic Vehicles with Aborting A*
Marcell Missura1, Arindam Roychoudhury1, Maren Bennewitz1 > 1All authors are with the Humanoid Robots Lab, University of Bonn, Germany. Contact: missura@cs.uni-bonn.de
Jul. 21.
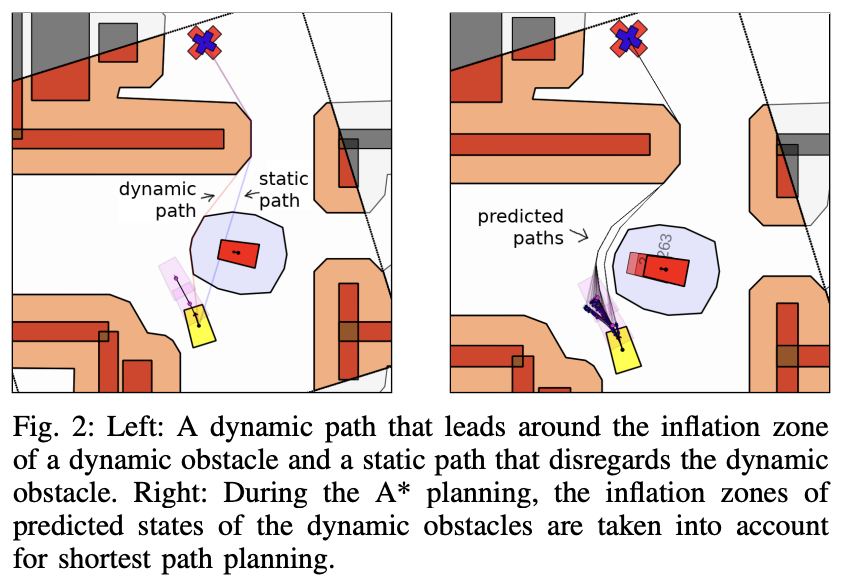
Fig. 1: Overview of ShortTerm Aborting A* (STAA*).
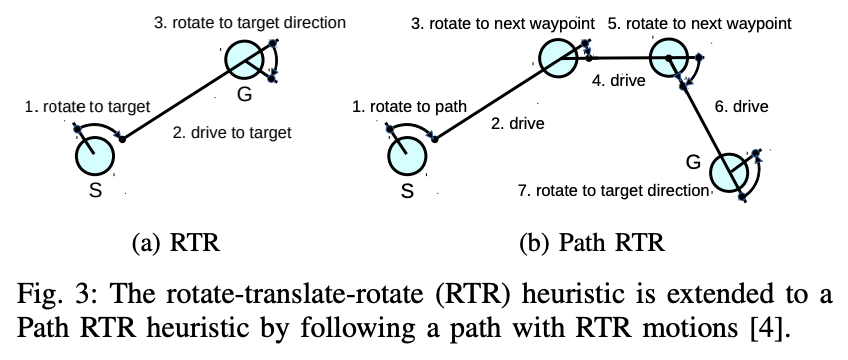
Fig. 2: Comparison between RTR and PathRTR.
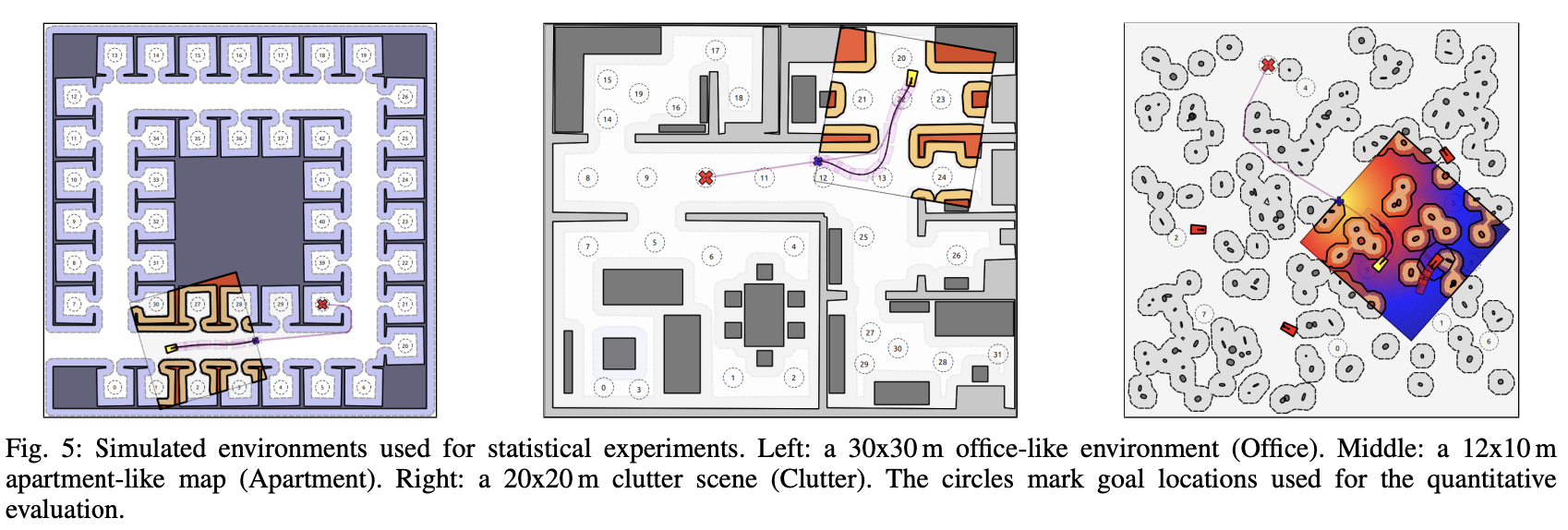
Fig. 3: Simulation setup.
Summary
- They present ShortTerm Aborting A* (STAA*): operates in locally bounded map (seems like dwa algorithm) and avoiding dynamic obstacles using short-term aborting a* algorithm.
- They find a global path via Minimal Construct algorithm. Due to the superior performance of the Minimal Construct algorithm, they can afford to recompute the global path in every control cycle; 4.34ms on average.
- The STAA* motion planner operates in a bounded local map; (8m X 8m square), additionally, they define intermediate global goal pose within the local map.
- Finally, they locally plan a collision-avoidance path using short-term aborting a*.
Contributions
- Local map representation
- They propose local map representation by inflating convex polygons to avoid planning through too narrow passages the agent would not fit through.
- Using Minimal Construct algorithm
- They set the local goal path as $\tilde{G}$ to plan in the local map.
- Short-Term Aborting A*: The centerpiece of this paper is specifically tailored for early abortion.
- Like DWA, they sample actions in discrete ranges (in the paper they sample 7x7 actions) based on velocity specs: $(v_{\text{max}}, ~ w_{\text{max}})$
- Then they predict the successor state using their dynamic model of the robot.
- The radius of the arc is obtained by only using $(v_{\text{max}}, ~ w_{\text{max}})$.
- They use SAT algorithm to check collisions.
- Separating Axis Theorem: Collision Detection Using the Separating Axis Theorem
- They evaluate heuristic functions leveraging RTR and PathRTR.
- rotate-translate-rotate (RTR) time function: estimate the time needed to drive along a path to the intermediate goal and to attain the goal direction.
Experiments
- Baselines
- PD controller, DWA, STAA* (ours)
- Evaluation of different heuristic functions
- Path RTR (ours)
- Path Euclidean
- Dijkstra
- when all agents are using STAA* as a planner, almost all collisions can be avoided no matter which heuristic is being used.
Thoughts
- The demo video shows powerful collision-free navigation and the visualization in the simulation is great.
- I think the main contribution of this paper is tailored for early abortion.
- They also mentioned that one of the parameters is a trade-off between precision and computation time.
- And the second-most contribution is a novel time evaluation in goal navigation: Path RTR. They officially released the code, but the implementation is in C++. So I have to study the code and hope to reimplement this algorithm in the mujoco environment.
Enjoy Reading This Article?
Here are some more articles you might like to read next: